About Me
I’m a second-year MS student in Robotic Systems Development at the Robotics Institute, Carnegie Mellon University.
I am actively exploring full-time opportunities in CV/ML and Robotics, with availability starting May 2026.
I can be reached at kmadhavb@cs.cmu.edu
Education
MS Robotic Systems Development, Aug. 2024 - May 2026
Carnegie Mellon University
B.Tech. Mechanical Engineering, Nov. 2020 - July 2024
Indian Institute of Technology, Indore
Experience
Computer Vision and Robotics Intern
• Created a novel visual odometry (VO) pipeline with GPS fusion for sparse stereo images, leveraging learning-based dense feature matching to generate high-fidelity 3D reconstructions of fruit crops and improving yield estimates.
• Experimentally validated the VO system, achieving robust performance with an Absolute Trajectory Error (ATE) of 2.5m and Relative Pose Error (RPE) of 0.5m over a 100m trajectory using only a sparse set of 300 images.
• Engineered a high-throughput stereo depth estimation pipeline using batch processing to parallelize a CUDA-accelerated high resolution stereo disparity estimation and I/O operations, boosting processing throughput by 44.4%.
• Experimentally validated the VO system, achieving robust performance with an Absolute Trajectory Error (ATE) of 2.5m and Relative Pose Error (RPE) of 0.5m over a 100m trajectory using only a sparse set of 300 images.
• Engineered a high-throughput stereo depth estimation pipeline using batch processing to parallelize a CUDA-accelerated high resolution stereo disparity estimation and I/O operations, boosting processing throughput by 44.4%.
Research Collaborator
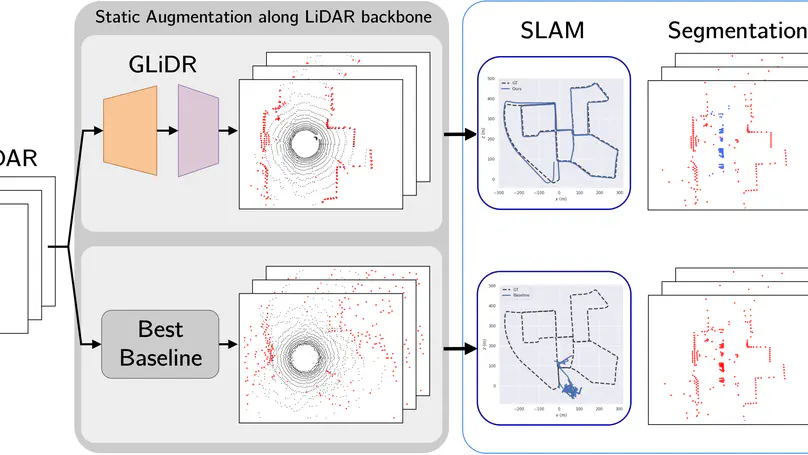
• Designed a generative graph neural network enhanced with topological regularization, to improve mapping for autonomous driving by removing dynamic objects from sparse LiDAR point clouds without segmentation labels.
• Demonstrated superior performance against existing methods (44% lower Chamfer Distance than state-of-the-art) in three real-world and simulated datasets, against five distance metrics with 32 times sparse LiDAR scans.
• Contributed to an adversarial deep generative model for point injections on LiDAR scans, demonstrating superior performance in degrading map quality without compromising scan integrity on KITTI and CARLA-64 datasets.
• Demonstrated superior performance against existing methods (44% lower Chamfer Distance than state-of-the-art) in three real-world and simulated datasets, against five distance metrics with 32 times sparse LiDAR scans.
• Contributed to an adversarial deep generative model for point injections on LiDAR scans, demonstrating superior performance in degrading map quality without compromising scan integrity on KITTI and CARLA-64 datasets.
Research Intern
• Engineered a four-wheel steering and driving (4WS) mobile robot platform using Design for Assembly (DFA) techniques, resulting in a modular and easily maintainable platform for kinodynamic navigation algorithm development.
• Developed C firmware for Raspberry Pi Pico microcontrollers, and integrated PID control to actuators and enabling joint state data collection and velocity feedback, enhancing navigational accuracy in unstructured environments.
• Created hardware-agnostic C++ software to interface PID angle and velocity controllers using the ROS Control framework via serial communication, leading to general middleware suitable to any 4WS robot platform.
• Developed C firmware for Raspberry Pi Pico microcontrollers, and integrated PID control to actuators and enabling joint state data collection and velocity feedback, enhancing navigational accuracy in unstructured environments.
• Created hardware-agnostic C++ software to interface PID angle and velocity controllers using the ROS Control framework via serial communication, leading to general middleware suitable to any 4WS robot platform.
Summer Intern, Autonomy Software
• Optimized Model Predictive Control (MPC) for Autonomous Mobile Robots (AMR) to achieve a 3x reduction in the turning radius, enabling sharp turns and in-place manoeuvres for space-constrained industrial units.
• Reformed MPC cost function optimization problem to consider physical motor constraints and latency, redesigned Jacobian matrix to speed up the solution compute time and validated it with comprehensive on-site testing.
• Validated state-of-the-art 3D LiDAR-based factor graph SLAM algorithms on real-world datasets of warehouses and shop floors and shaped a post-processing routine for raw point cloud and IMU data in rosbags for easy integration.
• Reformed MPC cost function optimization problem to consider physical motor constraints and latency, redesigned Jacobian matrix to speed up the solution compute time and validated it with comprehensive on-site testing.
• Validated state-of-the-art 3D LiDAR-based factor graph SLAM algorithms on real-world datasets of warehouses and shop floors and shaped a post-processing routine for raw point cloud and IMU data in rosbags for easy integration.


Other publications
(2024).
SLACK: Attacking LiDAR-Based SLAM with Adversarial Point Injections.
IEEE ICIP Challenges and Workshops (ICIPCW) 2024.
(2022).
Understanding the Heat Transfer Characteristics and Axis Switching Phenomenon in High Aspect Ratio Elliptical Orifice Impinging Synthetic Jets.
Fluid Mechanics and Fluid Power, Volume 1.